As discussed in part 1 of this two-part posting on early
power transistor evolution, by the early 1960’s germanium power transistors
were in widespread use in DC power supplies, audio amplifiers, and other
relatively low frequency power applications. Although fairly expensive at that
time the manufacturers had processes establish to reliably produce them in
volume. To learn more about early germanium power transistors
click here to
review part 1.
As with most all things manufacturers continued to
investigate ways of making things better, faster, and cheaper. Transistors were
still relatively new and ready for further innovation. Next to germanium
silicon was the other semiconductor in widespread use and with new and
different processes developed for transistor manufacturing, silicon quickly
displaced germanium as the semiconductor of choice for power transistors. One real
workhorse of a power transistor that has truly stood the “Test of Time” is the
2N3055, pictured in Figure 1. Also pictured is his smaller brother, the 2N3054.
Figure 1: 2N3055 and 2N3054 power transistors
Following are some key maximum ratings on the 2N3055
power transistor:
- VCEO = 60V
- VCBO = 100V
- VEBO= 7V
- IC = 15A
- PD = 115W
- hfe= 45 typical
- fT = 1.5 MHz
- Thermal resistance = 1.5 oC/W
- TJ= 200 oC
- Package: TO-3 (now TO-204AA)
- Polarity: NPN
- Material/process: Silicon
diffused junction hometaxial-base structure
Diffused junction silicon transistors made major inroads in
the early 1960’s ultimately making the germanium power transistors
obsolete. One huge improvement using
silicon, especially for power transistors, is the junction temperature, which
is generally rated for 200 oC.
This allowed operating at much higher ambient temperatures and at higher
power levels when compared to germanium.
While the alloy junction process being used for the early
germanium transistors favored making PNP transistors, the diffused junction
process on silicon favored making NPN transistors somewhat more. Silicon
diffused junction NPN transistors are much more prevalent than PNP devices, and
the PNP complements to NPN devices, where available, are more costly.
The diffusion process made a giant leap in transistor
mass production possible. Many transistors could now be made at once on a
larger silicon wafer, greatly reducing the cost. The
more precise nature of the diffusion junction over the alloy junction also
improved performance. As one example, tor the 2N3055 the transition frequency
increased roughly another order of magnitude over the 2N1532 germanium alloy
junction transistor in part 1, to 1.5 MHz.
The hometaxial-base structure is a single simultaneous
diffusion into both sides of a homogenously-doped base wafer, one side forming
the collector and the other side the emitter. A pattern on the emitter side is
etched away around the emitter, down to the P-type layer, to form the base. The
emitter is left standing as a plateau or “mesa” above the base.
The 2N3054 was electrically identical to the 2N3055
except for its lower current and power capabilities. It’s smaller TO-66 package
however was never very popular and was quietly phase out in the early 1980’s, sometimes
along with some of the devices that were packaged in it!
Process improvements beyond the single diffused
hometaxial-base structure continued through the 1960s with silicon transistors,
including double diffused, double- and triple diffused planar and epitaxial
structures. The epitaxial structure is a departure from the diffused structures
in that features are grown onto the top of the base wafer. With greater control
of doping levels and gradients, and more precise and complex geometries, the
performance silicon power transistors continued to improve in most all aspects.
Plastic-packaged power transistors have for the most part
come to displace hermetic metal packages like the TO-3 (TO-204AA), first due to
the lower cost of the part and second, with simpler mounting, reducing the cost
and labor of the products they are incorporated into. One drawback of most of
the plastic-packaged power devices is their maximum temperature rating has been
reduced to typically 150 oC, taking back quite a bit of temperature
headroom provided by the same devices in hermetic metal packages. Sometimes
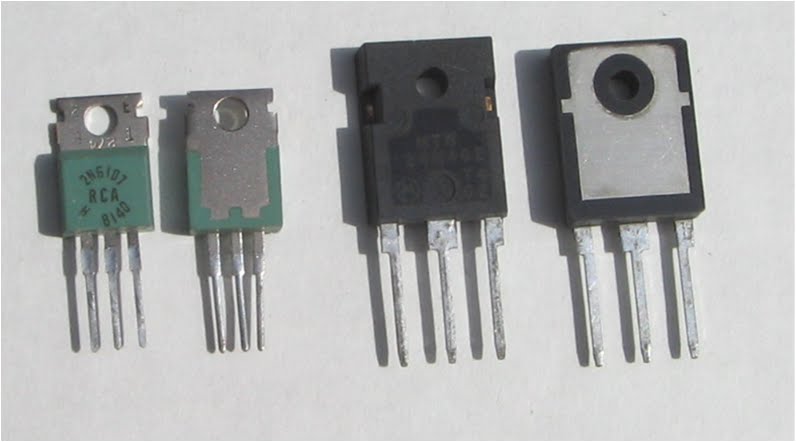
there is a price to be paid for progress! Pictured in figure 2 are two (of
many) popular power device packages, the smaller TO-220AB and the larger
TO-247.
Figure 2: TO-220AB and TO-247 power device plastic packages
It’s pretty fascinating to see how transistors and the
various processes used to manufacture them evolved over time. In these two
posts I’ve hardly scratched the surface of the world of power transistors and power
devices. For one there is a variety of other transistor types not touched upon,
including a variety of power FETs. Power FETs have made major inroads in all
kinds of applications in power supplies. Also work continues to provide higher
power devices in surface mount packages. These are just a couple of numerous
examples, possibly something to write about at a future date!
References: “RCA Transistor Thyristor & Diode Manual”
Technical Series SC-14, RCA Electronic Components, Harrison, NJ