Previously on Watt’s Up? a colleague wrote about how the
current limit setting affects a power supply’s voltage response time (click here to review). In this posting he clearly shows how a low current limit
setting can greatly slow down the output voltage turn on response time when
powering up your DUT.
While this is generally true and good advice, especially
for basic performance power supplies, there are additional things to consider
when working with high performance power supplies models, as you will see.
Many basic performance power supplies tend to have larger
output filter capacitors in order to achieve lower output noise performance. A
disadvantage of having a large output capacitor is that it slows down the
output voltage response speed of the power supply. Basic performance power
supplies can have turn on response times on the order of a 100 milliseconds.
High performance power supplies operate by a somewhat
different set of rules. In comparison to basic performance power supplies they
typically have much smaller output capacitors and they are designed to have
output turn on and turn off response times on the order of a millisecond or
less.
However, absolute fastest is not always the best and that
is why fast, high performance power supplies also usually incorporate an output
voltage slew rate control as well. This allows you to optimize the output turn
on and turn off speed for your particular application. This lets you take
advantage of the faster output speed you have available, without it being
overkill and cause other problems.
The two most common problems that arise when powering up
and powering down many DUTs are related to charging and discharging the input
filter capacitor incorporated into them. They are:
- High peak inrush (and discharge) currents due to the high dV/dt slew rate being applied
- Power supply CC-CV mode cross over issues resulting from the high peak inrush current
To illustrate, the turn on characteristic of our N6762A
power supply was captured when powering up a load consisting of a 1,200
microfarad capacitor in parallel with a 10 ohm resistor. The N6762A was set to
10 volts and its voltage slew rate set to maximum. This was captured using the N6762A’s
digitizing voltage and current readback together with the 14585A software,
shown in Figure 1.
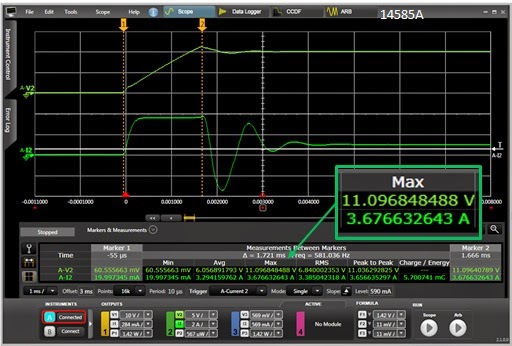
Figure 1: N6762A power supply turn on response set to
maximum slew rate into parallel RC load
The vertical markers have been placed at zero and maximum
voltage points of the turn on ramp. The peak inrush current reaches 3.7 amps
and the peak voltage overshoots to 11.06 volts, 10% over the 10 volt setting.
The overshoot is a result of the power supply crossing over into current limit
during the ramp up and allowing the voltage to rise to 11.06 volts before the
voltage control loop regains control to bring the output back down to 10 volts.
It also takes a little while for the voltage to settle after the peak
overshoot. Both the overshoot voltage and peak inrush current can be problems
when powering up a DUT. These occur as a result of having too fast of a voltage
slew rate when powering the DUT.
To address the problem we then set the N6762A’s slew rate
to a more acceptable value of 2,000 volts/second. The turn on voltage and
current were again captured and are shown in Figure 2. As can be seen the
voltage overshoot is eliminated and the inrush current has been reduced to a
more moderate 3.3 amps.

Figure 2: N6762A power supply turn on response set to
2,000 V/s slew rate into parallel RC load
So in closing high performance power supplies have a
significant advantage in their output response speed, in comparison to basic
power supplies. And while faster is usually better, absolute fastest may not be
best, and this applies to the output response time of power supplies as well!
But by having the ability to set the output slew rate on high performance power
supplies gives you the ability to optimize its speed for your given
application, providing for the best possible outcome possible!
.